Robotmaster 產品特色
透過 Robotmaster 整機模擬,路徑調整直接生成機器人準備碼。採用典型 CAD/ CAM 工具及CNC程式編輯模式的易用性,提供更簡潔易用的機器手臂工具程式,獨立製作簡易Cam刀具路徑,快速生成3D曲線,五軸點運動路徑。
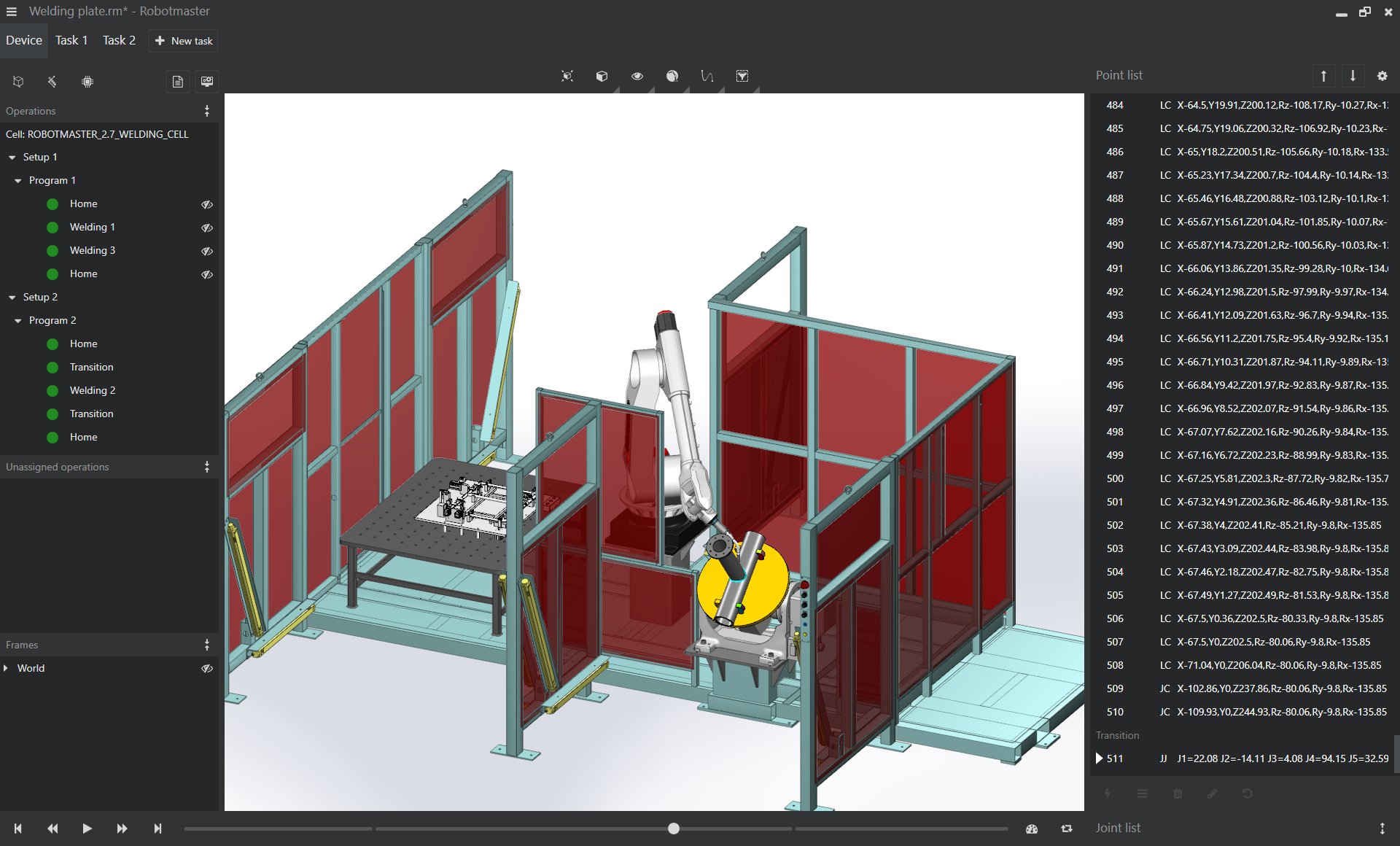

路徑優化
還在為了解決機械手臂干涉碰撞與奇異點等問題與現場設備不斷的做程式調整嗎?Robotmaster 添加圖形優化功能,顯示程式化的軌跡以及問題區域,解決機械手臂奇異點問題。另外,人性化的使用者介面能夠輕鬆地創建一個自由程式,當出錯的問題區域以滑鼠拖動路徑線閃避即可,取得最佳路徑時並可取得每點位,在每個區段間做及時動態編輯與調整。只需要簡單的拖曳滑鼠及內建最佳化功能,即可閃避碰撞干涉與奇異點問題。

創新的介面簡化使用者路徑
使用者可以修改參數畫面,定義應用的具體界面和控制設置,能輕鬆地修改並進行路徑的最佳化模擬。
有問題會干涉的路徑為紅色,拖動後沒問題的運動曲線為綠色。
使用方式:用滑鼠拖拉就可移動運動曲線
可以顯示以下問題方面,並易於管理,並提供自動選擇項目:
-Singularity 奇異點
-Out of reach 超出範圍
-Joint limits 超出關節角度
-Over travel 超行程
-Wrist flips 超出手腕翻轉
-Collisions 碰撞
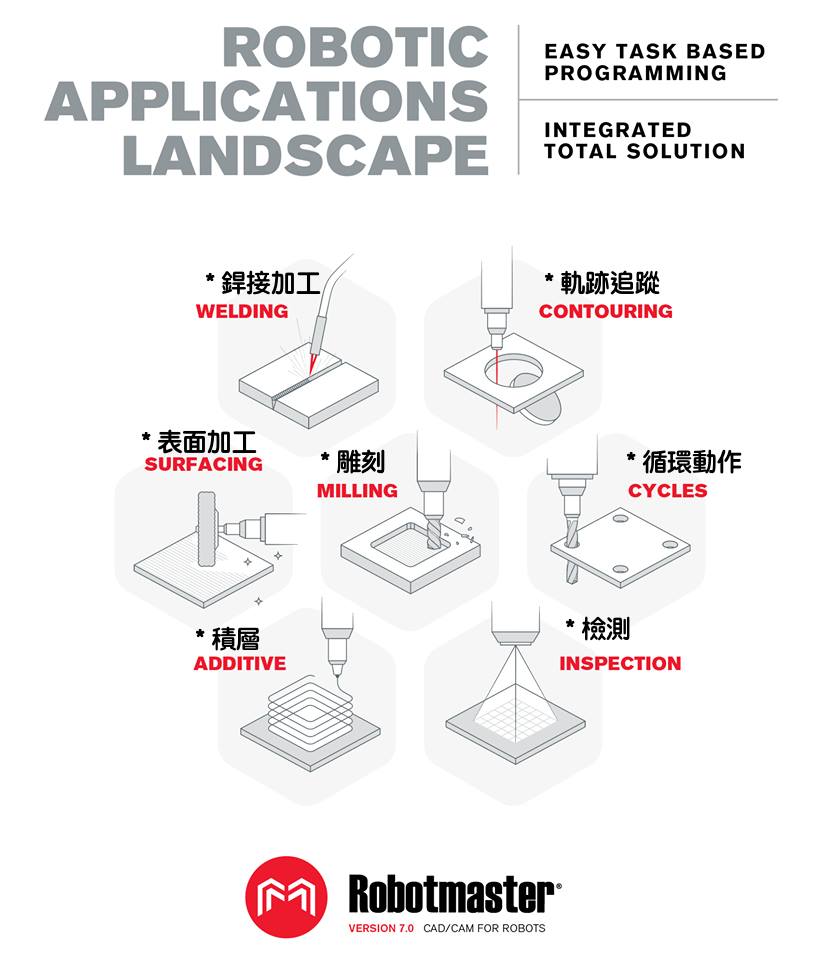
輕鬆簡單,CAD 轉出機械手臂碼
透過使用CAD圖型,快速產生離線機械手臂程式








強大智能的程式設計
無論是根據 CAD 模型直接在 Robotmaster 中生成機器人軌跡,還是導入 CAM 工具路徑,Robotmaster 均為一款功能強大的智慧離線程式設計解決方案。憑藉嵌入式處理專家,用戶可以輕鬆地生成機器人代碼。
導入CAD
手臂系統
設置
設置
工具路徑
創建
創建
程式驗證
輸出
Robotmaster 專業版/標準版 版本差異
| 功能 | 標準版 | 專業版 |
|---|---|---|
|
最佳化,過渡和工作空間 |
基本優化(範圍,關節限制,奇異點,手腕翻轉,超行程和碰撞) |
基本優化、進階優化、傾斜優化、碰撞圖多線程、軌道/旋轉軸 優化、自動和基於標準的優化、工作區分析、圖形轉換 |
|
外部軸軌道功能 |
僅限定位/不可同步優化 |
完全同動控制/可優化 |
|
外部軸旋轉功能 |
完全同動控制/不可同步優化 |
完全同動控制/可優化 |
